ピックアップコンテンツ
- ホーム
- ピックアップコンテンツ
- <プレスリリース>高層ビル街でも正確測位 確率的なアプローチで従来手法を上回る新手法を開発(理工学研究科・目黒 淳一)
<プレスリリース>高層ビル街でも正確測位 確率的なアプローチで従来手法を上回る新手法を開発(理工学研究科・目黒 淳一)
- 公開日時:2025.12.24
- 共有:


高層ビル街でも正確測位
確率的なアプローチで従来手法を上回る新手法を開発
航空機や自動車、バスなどの自動運転車両をはじめ、屋外を移動するロボットにとって、正確な絶対位置の把握は安全性や信頼性の確保に直結する重要な課題であり、さらなる精度向上が求められています。
名城大学大学院理工学研究科の目黒 淳一准教授(ロボット工学/ITS)、新美 大樹 修士課程 2 年らのグループは、全球測位衛星システム(GNSS)による測位が劣化しやすい都市環境においても、高精度な位置推定を実現する新しい測位手法を提案しました。
本研究成果は、2025 年 11 月 17 日にロボティクス分野において世界的に評価の高い国際学術誌「IEEE RA-L(Robotics and Automation Letters)」に掲載されました。
【本件のポイント】
・都市環境での安定した高精度測位:
ビルによる信号遮蔽や反射が多い都市環境において、従来広く利用されてきた高精度測位手法を上回る安定性と精度を実現
・確率的なアプローチにより複雑処理を排除:
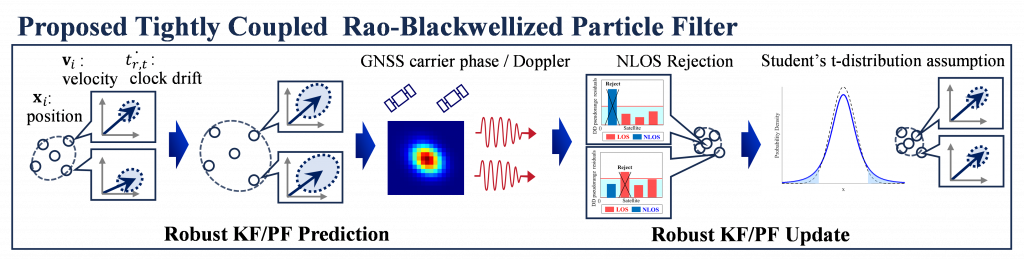
従来不可欠とされてきた衛星信号の波の数を正確に数え上げる「整数アンビギュイティ」の処理を行わない確率的なアプローチにより、信号が途切れやすい場所でも頑健な位置推定を実現
・実環境での性能実証:
名古屋 / 東京のオフィス街・高架下など、計 6 箇所の過酷な都市環境で実証実験を実施し、従来手法では高精度な測位が困難な状況下においても、高精度に自車位置を推定できることを実証
掲載論文
【掲載誌】IEEE RA-L(Robotics and Automation Letters)
【論文タイトル】Tightly Coupled Rao-Blackwellized Particle Filter for GNSS-Only Positioning in Urban Environments Without Ambiguity Resolution
【著者】Daiki Niimi, An Fujino, Taro Suzuki, Junichi Meguro
【掲載日】2025年11月17日
【URL】https://ieeexplore.ieee.org/document/11282982
プレスリリース本文はこちら
https://www.meijo-u.ac.jp/news/asset/e8f0b7667162fc6a7254f596650a6e95_1.pdf